
27. červen 2026
Načítání...
Asynchronní stroje - konstrukce, princip funkce a řízení
Jiří Čermák
10. únor 2017, 18:36 (Aktualizace: 2. březen 2019)
3 komentáře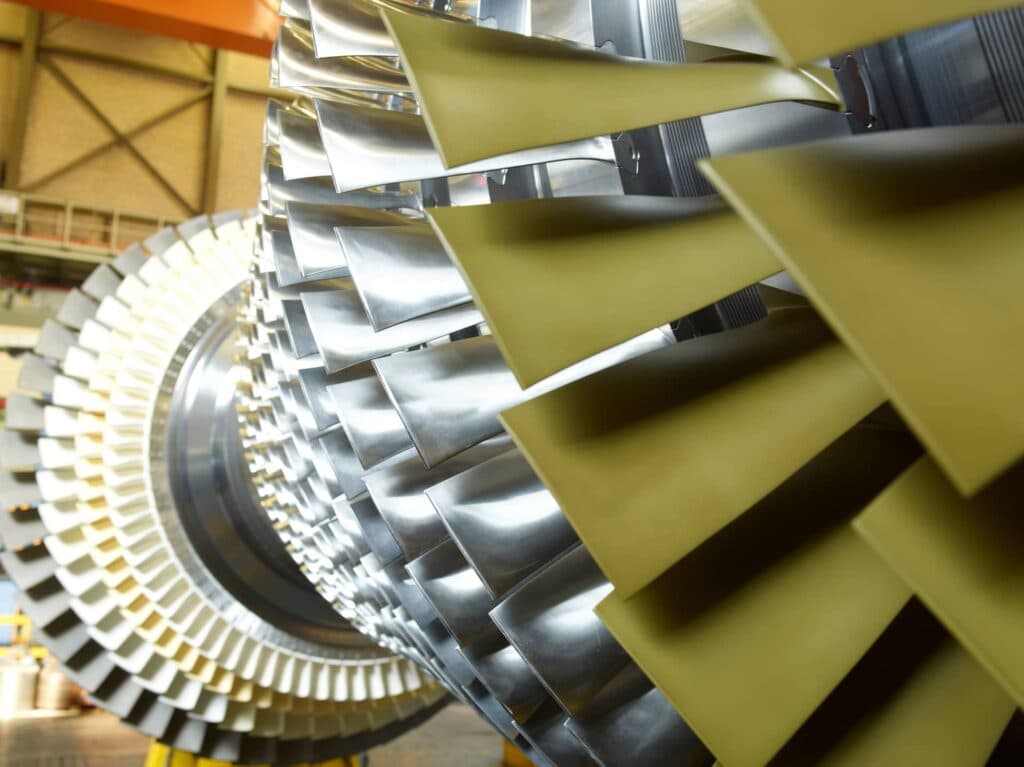
Mezi nejhojněji používané elektrické točivé stroje patří asynchronní stroje, které mohou pracovat jako motor i generátor. Asynchronní stroje pracují na principu elektromechanické přeměny energie.
V praxi se nejčastěji používají asynchronní motory konající otáčivý pohyb hřídele kolem své osy. Dalším typem pohybu motoru může být lineární pohyb, což znamená, že stroj nemá otáčivou hřídel, ale může se pohybovat pouze po přímce.
Asynchronní stroje se hojně rozšířily po celém světě díky své konstrukční jednoduchosti a díky tomu, že jsou prakticky bezúdržbové. Používají se především jako čerpadla, kompresory, ventilátory, jeřáby, výtahy či stavební zařízení.
V tomto článku jsou postupně představeny:
- konstrukce asynchronních strojů,
- princip funkce asynchronního stroje,
- pracovní režimy asynchronního stroje,
- řízení asynchronních strojů a momentová charakteristika.
Konstrukce asynchronních strojů
Jako všechny ostatní točivé stroje obsahuje asynchronní stroj pevně zabudovanou část nazývanou stator a pohyblivou část rotor. Stator může být tvořený pevnou litinovou, svařovanou nebo hliníkovou částí a obsahuje dva ložiskové štíty. V této kostře jsou zalisovány vzájemně odizolované plechy tvořící jednu část magnetického obvodu.
Na hřídeli umístěné uvnitř statoru v ložiskových štítech jsou nalisovány rotorové plechy. Mezi statorem a rotorem je malá vzduchová mezera. Přes stator, rotor a tuto vzduchovou mezeru se uzavírá magnetický tok v motoru. Nalisované statorové i rotorové plechy obsahují drážky, ve kterých je uloženo vinutí stroje.
Toto vinutí může být jednofázové, častěji pak trojfázové. Začátky a konce cívek jsou vyvedeny na svorkovnici, která slouží k připojení motoru ke zdroji napětí.
Motory větších výkonů mají rotory tvořeny neizolovanými měděnými nebo mosaznými vodiči, které jsou spojeny kruhy nakrátko. Takovému rotorovému vinutí se říká klec.
Motory s trojfázovým vinutým rotorem mají začátky cívek spojeny do jednoho uzlu (zapojení do hvězdy), konce jsou připojeny ke kroužkům, kterých se dotýkají kartáče. To umožňuje připojit do obvodu rotoru další zařízení, například odpor do každé fáze a podobně.
Proč se to vlastně točí?
Vůbec nejrozšířenějším typem asynchronního stroje je motor s trojfázovým vinutím na statoru. Toto vinutí je připojeno na trojfázovou síť a uvnitř statoru se vytváří točivé magnetické pole. Pohyb magnetického pole zajišťuje, že indukční siločáry protínají vodiče na rotoru a v rotoru se indukuje napětí. Toto napětí zajišťuje, že rotorem protéká proud, což způsobuje silovou interakci vodičů na rotoru s vodiči na statoru.
Napětí se ve vodičích indukuje pouze tehdy, pokud se rotor pohybuje relativním pohybem vůči točivému elektromagnetickému poli statoru. To znamená, že pokud se na statoru vybudí magnetické pole naříklad o 3 000 otáčkách za minutu způsobené napájecím napětím o frekvenci 50 Hz, a rotor se otáčí 3 000 otáčkami za minutu, pak se rotor nepohybuje relativně vůči točivému poli statoru a v rotoru se nemůže indukovat napětí.
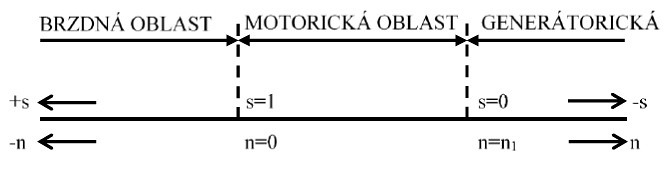
Rotor se tedy musí pořád otáčet s menším počtem otáček za minutu, než jak se otáčí pole na statoru. Rozdíl otáček na statoru a na rotoru se nazývá skluz a je dán vztahem

kde n1 jsou synchronní otáčky magnetického pole statoru a n jsou mechanické otáčky rotoru. Otáčky magnetického pole statoru závisejí na počtu pólů statoru. Výše zmiňovaný stroj se 3 000 otáčkami za minutu má dva póly – jednu pólovou dvojici. Ta je rozdělena na severní a jižní pól.
Skluz stroje závisí na velikosti zatížení stroje. Čím je větší zatížení, tím je větší skluz. Počet otáček točivého pole statoru za minutu je dán podílem frekvence a počtem pólových dvojic (p).


Pracovní režimy asynchronního stroje
Asynchronní stroje pracují ve velké většině případů jako motory. To platí v případě, že se jejich otáčky nacházejí v oblasti od nuly do synchronních otáček. Stroj může ale pracovat i jako generátor, pokud mechanicky roztáčíme hřídel, a tím pádem celý rotor. Platí pro oblast na momentové charakteristice (na obrázku níže), kdy rotor má vyšší než synchronní otáčky.
V případě, že zablokujeme pohyb rotoru, mohou asynchronní motory pracovat i jako transformátory pro regulaci napětí. Převod takového transformátoru je dán natočením cívek rotoru vůči cívkám statoru. V případě zabrzděného rotoru má napětí na něm frekvenci stejnou, jako je frekvence napájecí sítě.
Pokud uvažujeme stroj pracující v motorickém režimu, pak frekvence indukovaného napětí je závislá na velikosti skluzu rotoru vůči statoru. Platí, že čím je rychlost otáček rotoru bližší synchronním otáčkám statoru, tím je frekvence rotorového napětí menší.
Řízení asynchronních strojů a momentová charakteristika
Elektrický motor je charakteristický svými parametry. Mezi nejdůležitější patří velikost proudu odebíraného ze sítě, způsob zapojení (hvězda nebo trojúhelník) cívek ve statoru, velikost napětí, jmenovitý moment, otáčky a výkon. Výkon závisí na momentu stroje M a na okamžitých otáčkách hřídele ω a je dán vztahem
![]()
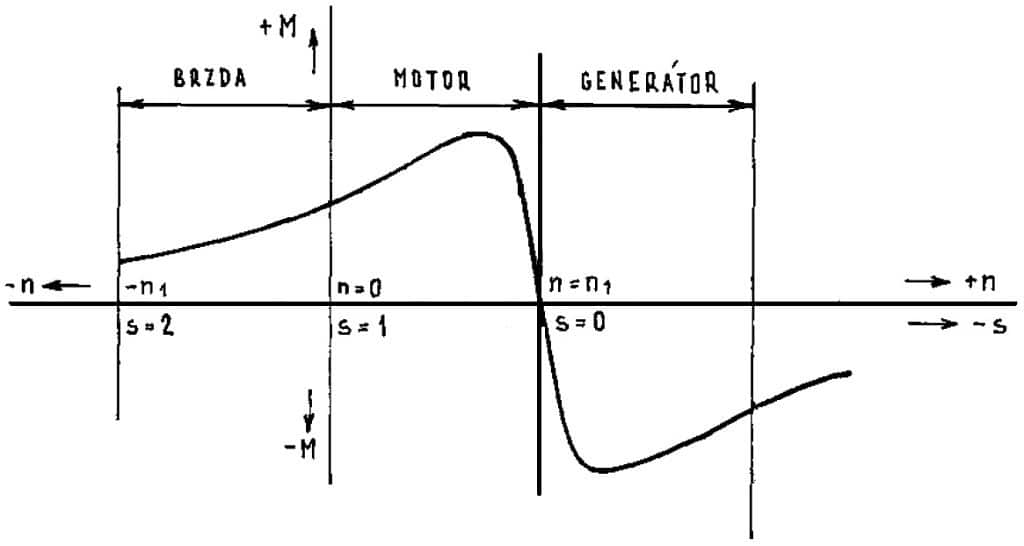
Nejdůležitější charakteristikou elektrického motoru je momentová charakteristika. Ta vyjadřuje velikost momentu na hřídeli v závislosti na otáčkách. V rozmezí od nuly do synchronních otáček (rotor má stejné otáčky jako pole statoru) stroj pracuje jako motor. Při překročení těchto otáček se ze stroje stane generátor.
Při rozběhu asynchronního motoru z nulových otáček protéká statorovým vinutím až sedminásobek jmenovitého proudu. Tento proud klesá na jmenovitý proud ihned po úplném roztočení stroje, přesto však představuje rizikový faktor schopný negativně ovlivňovat životnost celého stroje. Žádoucí tedy je účinně snižovat velikost startovacího – tzv. záběrného proudu. K tomu slouží celá řada postupů, mezi něž patří například:
- zapojení předřadných odporů (snižují velikost proudu tekoucího statorovým vinutím),
- spouštění autotransformátorem (plynule zvyšuje hodnotu napájecího napětí),
- přepínač hvězda/trojúhelník (využívá toho, že proud ve trojfázové soustavě je menší, pokud je zátěž (cívky motoru) zapojená do hvězdy, než pokud je zapojena do trojúhelníka (do hvězdy teče třetinový proud proti proudu do trojúhelníka)),
- frekvenční měnič (umožňuje plynulou regulaci napájecí frekvence a tím pádem i rychlost otáčení točivého magnetického pole na statoru),
- softstartér – regulátor napětí (reguluje velikost napájecího napětí a mění skluz motoru).
Otáčky již běžícího motoru můžeme měnit například změnou skluzu, změnou napájecí frekvence, změnou počtu pólů na statoru nebo změnou napětí. Otáčky jsou dány vztahem:
![]()
Pokud nemůžeme čekat na samovolný doběh odpojeného motoru od napájení a potřebujeme zastavit motor elektricky, je možné využít brzdění protiproudem. Jedná se o prohození sledu fází. Tím dojde ke změně směru pohybu točivého pole a rotor pohybující se nově v protisměru vytváří brzdný moment. Generátorické brzdění využívá změnu počtu pólů. Tímto způsobem lze skokově měnit otáčky, nemůžeme však stroj úplně zastavit. Dynamické brzdění spočívá v tom, že odpojíme zdroj třífázového napětí a necháme cívkami protékat stejnosměrný proud.
Zdroj úvodní fotografie: www.maximintegrated.com/en.html
Reference: Studijní texty FEKT, VUT v Brně
Sdílejte článek prostřednictvím:
Byl pro vás tento článek užitečný?
Podpořte web a jeho autory symbolickou částkou
Témata:elektrický stroj
Loading...
Mohlo by vás zajímat

2. červenec 2026

4. červenec 2026
21. červenec 2026

22. červenec 2026

19. červenec 2026
22. červenec 2026

24. červenec 2026
Komentáře (3)
Josef11. únor 2017, 18:30
Nevím kro tento článek spal, ale měl bych k němu několik poznámek.
1) typický as. stroj je motor s kotvou na krátko, tak kotva není vynutá - viz obrázek klecové kotvy. Takže představa že mohu běžný motor použít jako transformátor není reálná a pro lidi bez poměrně hlubokých znalostí o motorech zavádějící. Takový speciální stroj by navíc jako transformátor fungoval mizerně , protože by byl měkký, neboť magnetický obvod je oddělen vzduchovou mezerou. Pokud zastavím rotor as. stroje pak v běžném případě dojde k jeho zničení.
2) spouštění - běžné as. stroje nemají problém s proudovým nárazem a důvody snah o jeho snížení nejsou v praxi vedeny ochranou stroje , ale sítě , která by jinak musela být konstruovaná na mnohem větší zatížení což je drahé.
- odporové spouštění je špatně popsáno, žádné odpory se pro spouštění nepoužívají, pokud se používali nějaké odpory používali se do rotoru u stojů s vinutým rotorem. U strojů s klecovou kotvou na krátko , kterých je drtivá většina ( jiné se fakticky nepoužívají ) se do statoru dnes nedávají odpory , ale varistory. Tímto lze levně omezit spouštěcí proud u menších motorů oproti dražšímu softstartéru.
- jinak je hezky vysvětlen důvod proč se troj točí, snad jen by chtělo vysvětlit proč se v takovém stoji vytváří to točivé pole a jak je to u 1f. strojů z kterými se běžný čtenář setkává nejvíce a dále pak by autor mohl zmínit , že as. stroj vymyslel Nikola Tesla a proč vlastně je as. stroj tak rozšířený.
Jinak řízení otáček as. stroje lze dělat jen 2 způsoby
1) frekvenčním měničem a nebo změnu počtu pólů u všech ostatních způsobů se jedná fakticky o degradaci výkonu a účinnosti stroje.
Karel Panský20. únor 2017, 00:18
Odpověď na: Josef, 11. únor 2017, 18:30
V případě spouštění asynchronních motorů s kotvou nakrátko se používal tzv. statorový spouštěč, který tvořily omezovací impedance (rezistory) zapojené do série se statorovým vinutím, ty se postupně stykači vykrátily. Stačí zadat do vyhledávače "spouštění asynchronních motorů", jistě dohledáte. .-)
Karel Panský20. únor 2017, 00:24
Odpověď na: Josef, 11. únor 2017, 18:30
V případě spouštění asynchronních motorů s kotvou nakrátko máte špatné informace, motor měl tzv. statorový spouštěč, tvořený impedancemi (odpory) zapojenými do série se statorovým vinutím. Při rozběhu tyto byly postupně stykači vykráceny. Pro omezení ztrát se tam navíc vřazovaly impedance v podobě cívek. Stačí zadat do vyhledávače "spouštění asynchronních motorů". .-)
Loading