Řídicí systémy pro HVDC interkonektory
Jednou z oblastí, kterým se společnost Unicorn v energetice věnuje, je vývoj řídicích systémů pro HVDC (High-voltage Direct Current) interkonektory propojující například kontinentální Evropu s Velkou Británií. V uplynulých čtyřech letech společnost vyvinula a několikrát úspěšně nasadila vlastní produkt INCA (Interconnector and Network Control Application), který disponuje nejen vysokou spolehlivostí a stabilitou, ale také dostupností 24/7/365.
Důležitým procesem, který INCA zajišťuje, je výpočet plánovaného
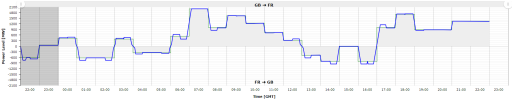
a optimalizovaného toku elektřiny na daném interkonektoru. Výpočet je založen na zobchodovaných hodnotách elektřiny pro obchodní den, na konfiguraci a dostupné kapacitě linku (ta může být snížena např. vlivem plánovaných odstávek). Zobchodované hodnoty, tzv. nominace, jsou definovány v MW po jednotlivých periodách dne a jsou typicky popsány diskrétními hodnotami očekávané dodávky v daném směru. Výkon interkonektoru není možné měnit diskrétními „skoky“, proto systém INCA počítá tzv. referenční program, který optimálně popisuje nominace a zároveň je možné provozně dosahovat jeho hodnot. Referenční program používá pro požadované změny výkonu tzv. přechodové rampy, např. 100 MW/min, 80 MW/min atd. Ve výsledku představuje spojitou křivku a obvykle se počítá pro celý obchodní den.

V praxi to znamená, že pokud je na základě nominací požadováno změnit výkon např. z 500 MW na 700 MW ve stejném směru, při použití rampy 100 MW/min bude interkonektor dvě minuty rovnoměrně rampovat na vyšší hodnotu. Takové rampování je však typicky spojeno s provozní odchylkou od plánovaných hodnot, která v daných vypořádacích periodách může vznikat. Někteří operátoři HVDC interkonektorů požadují minimalizaci takových odchylek.
Na základě vypočteného referenčního programu je potom HVDC systém instruován. INCA generuje instrukce v konkrétním protokolu, který je používán pro komunikaci mezi řídicím systémem INCA a HVDC systémem. Způsob instruování se může lišit v závislosti na konkrétním linku, nicméně v praxi jsou preferovány standardní průmyslové protokoly. Na některých kabelech se posílají instrukce periodicky, i pokud v daném čase není žádná změna výkonu vyžadována. Dalším způsobem je posílání instrukce s každou změnou v referenčním programu.
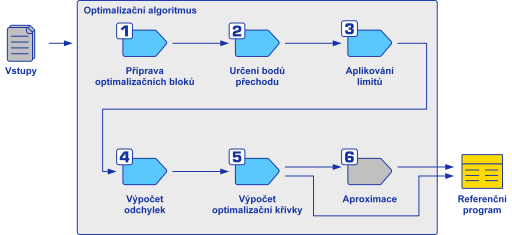
Pokud provozovatel interkonektoru požaduje minimalizaci provozních odchylek, používá řídicí systém INCA v rámci výpočtu referenčního programu optimalizační algoritmus. Ten se může drobně lišit napříč jednotlivými řídicími systémy, nicméně jeho princip zůstává stejný. Optimalizační algoritmus se skládá z následujících kroků:
- Příprava optimalizačních bloků
- Určení bodů přechodu
- Aplikování limitů
- Výpočet odchylky
- Výpočet optimalizační křivky
- Aproximace
Referenční program se vždy generuje pro konkrétní časový úsek a tento úsek se dělí na jednotlivé podintervaly – optimalizační bloky. V prvním kroku algoritmu se načtou a určí hodnoty potřebné k výpočtu programu pro každý optimalizační blok. Pro optimalizační blok je minimalizována odchylka a obvykle je jeho délka rovna délce vypořádací periody. Atributy jednotlivých bloků se mohou lišit (např. vlivem konfigurace), proto první krok zajišťuje jejich korektní nastavení.
Dalším krokem je určení jednotlivých bodů přechodu mezi požadovanými změnami v nominacích. V ideálním případě je bod určen tak, aby v obou přilehlých blocích byla vzniklá odchylka úplně minimalizována. To není možné vždy, například při rampování z nejnižší kapacity [MW] kabelu na nejvyšší – v takovém případě už na optimalizaci „není prostor“. Existuje mnoho dalších omezení optimalizace jako omezení velikosti použité rampy, výšky optimalizační křivky, atp.
Ve třetím kroku algoritmus kontroluje, zda je každý nalezený bod přechodu v intervalu daném plánovanou kapacitou interkonektoru. Hodnoty kapacity pro oba směry toku jsou (stejně jako hodnoty nominací) definovány po periodách a reflektují plánované odstávky kabelu.
Na základě finálních bodů přechodu je pro každý optimalizační blok spočtena odchylka, která rampováním přes tento bod vzniká.
Poté je již možné určit optimalizační křivku, která tyto provozní odchylky minimalizuje. Pokud v daném bloku vlivem rampování „přebývá“ elektrický výkon, je tento výkon optimalizační křivkou ubrán, analogicky je tomu v případě nedostatku elektrického výkonu v optimalizačním bloku.
V posledním kroku je možné vygenerovaný referenční program aproximovat „vyhlazenější“ křivkou. Takový krok může být technicky výhodný, neboť méně změn v referenčním programu znamená méně rampování, které interkonektory může zatěžovat. Tento krok je nepovinný a závisí na konfiguraci konkrétní instance produktu INCA.
Řídicí systémy INCA mají tedy pro provozovatele HVDC interkonektorů vysokou přidanou hodnotu, protože svým provozem přispívají nejen k bezpečnému řízení, ale rovněž možnou optimalizací referenčního programu zajišťují vyšší ekonomický zisk provozovatele (provozovatelé mohou být za způsobené odchylky od nominací výrazně penalizováni). Zároveň vzhledem k široké konfigurovatelnosti optimalizačního algoritmu a celého řídicího systému INCA mohou provozovatelé snadněji reagovat na potenciální změny pravidel výpočtu referenčního programu a provozu HVDC interkonektorů celkově.



Komentáře v diskuzi mohou pouze přihlášení uživatelé. Pokud ještě účet nemáte, je možné si jej vytvořit na stránce registrace. Pokud již účet máte, přihlaste se do něj níže.
V uživatelské sekci pak můžete najít poslední vaše komentáře.
Přihlásit se